FANUC A16B-3200-0610 6 축 서보 드라이브 상위 보드 A06B-6107 서보 증폭기, R-J3iC 및 R-30iA 로봇 컨트롤러, FSSB 인터페이스, 일본 원산
전반적인 설명
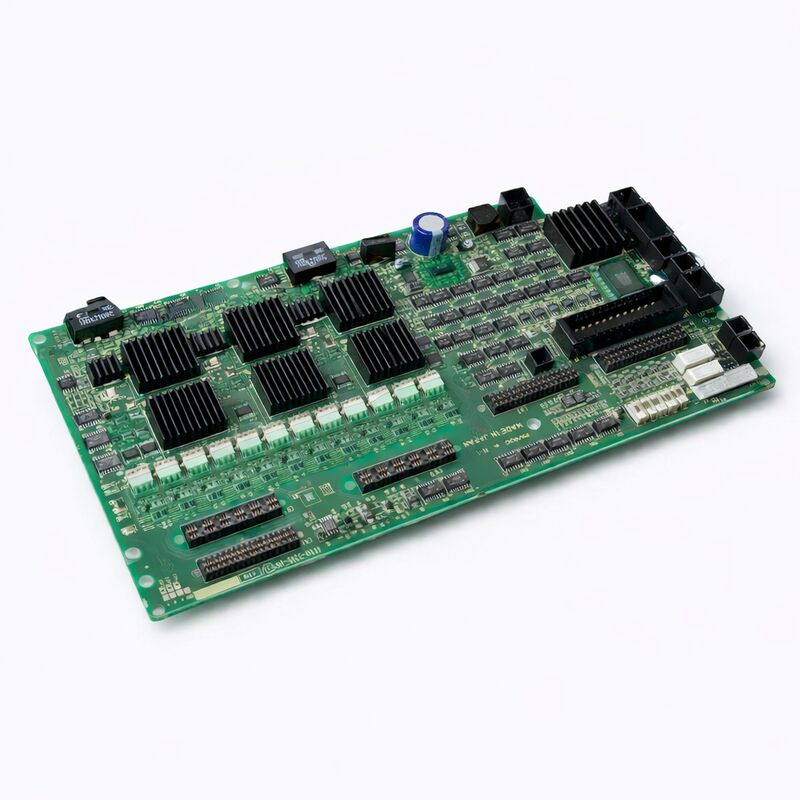
의FANUC A16B-3200-0610A06B-6107 FANUC의 6축 통합 서보 증폭기의 제어 지능 계층입니다. R-J3iC와 R-30iA 로봇 세대를 위해.
A06B-6107 증폭기의 물리적 장막 내에서 두 종류의 회로 보드가 파트너십으로 작동합니다. 전력 보드 (A20B-2101-0224 및 A20B-2101-0234/0221/0230,특정 H 시리즈 변종에 따라) 고전류 IGBT 스위치 및 DC 버스 정렬을 처리합니다., 그리고 A16B-3200-0610 제어 상위 보드는 모든 디지털 인텔리전스를 제공합니다. Servo 알고리즘 실행, FSSB 통신, 오류 모니터링, LED 진단.
이름 "위판"은 물리적으로도 기능적으로도 정확합니다: A06B-6107 증폭기의 물리적 레이아웃에서 A16B-3200-0610은 전력판 위에 장착되어 있습니다.증폭기 단위의 앞부분에서 접근 할 수 있습니다..
이 전면 접근 가능한 장착은 FANUC의 로봇 드라이브 설계에서 중요한 서비스 기능입니다전체 증폭기를 해체하거나 전력 섹션 배선을 방해하지 않고 액세스 할 수 있습니다..
왜 하나의 제어판이 6개의 축을 모두 공급하는지 이해하려면 A06B-6107의 디자인 철학을 이해해야 합니다.FANUC는 A06B-6107을 단일 전력 섹션이 6 축 드라이브에 걸쳐 직렬 DC 버스를 공유하는 통합 장치로 설계했습니다., 그리고 하나의 제어판은 모든 6 축의 전류 루프와 FSSB 통신을 동시에 관리합니다.
이 통합은 전체 증폭기 발자국을 줄이고 드라이브 캐비닛과 로봇 컨트롤러 사이의 배선을 단순화합니다.그리고 유지보수를 더 적은 수의 별도의 사용 가능한 부품에 집중시킵니다..
주요 사양
| 매개 변수 |
가치 |
| 기능 |
6축의 세로 드라이브 제어판 (위쪽) |
| 호환성 증폭기 |
A06B-6107-H001/H002/H007 시리즈 |
| 호환되는 컨트롤러 |
R-J3iC, R-30iA |
| 인터페이스 |
FSSB 광섬유 |
| 축 제어 |
6 (J1 ~ J6) |
| 전력 이사회 파트너 |
A20B-2101-0224/0234/0221/0230 |
| 원산지 |
일본 (일본에서 제조) |
R-30iA 로봇 시스템에서 A06B-6107
R-30iA 컨트롤러 캐비닛의 핵심 부품은 A06B-6107 6축 서보 증폭기입니다.
R-30iA의 콤팩트 드라이브 섹션은 로봇 컨트롤러 상자 자체에 맞게 설계되었습니다.R-30iA의 통합 설계는 세르보 증폭기를, 주 PCB, 안전 보드, 그리고 전원 공급 장치 모두 로봇 기단 근처 또는 기단 위에 장착될 수 있는 하나의 제어 장치 안에 있습니다.
로봇 프로그램에서 로봇 동작으로 신호 흐름은 A16B-3200-0610을 통해 다음과 같이 통과합니다.로봇 컨트롤러의 메인 CPU 보드 (A16B-3200-0600 또는 관련 버전) 는 FSSB 광섬유 링크를 통해 모든 6 축에 대한 공동 위치 명령과 속도 명령을 전송합니다..
A16B-3200-0610은 이 명령들을 수신하고 FSSB 일련 프로토콜에서 디코딩하여 6축 전류 제어 루프 각에 대한 적절한 전류 참조를 생성합니다.그것은 동시에 세르보 증폭기의 피드백 커넥터를 통해 여섯 공동 servomotors에서 인코더 피드백을 수신, 각 축의 속도 및 위치 루프를 닫고, PWM 게이트 드라이브 신호를 실제로 모터 전류를 전환하는 전력 보드의 IGBT 트랜지스터로 출력합니다.
이 전체 제어 주기는 명령 수신, 피드백 처리, 루프 닫기, 게이트 드라이브 출력 모든 6 축에 대해 250μs (4kHz PWM 주파수에서) 마다 동시에 반복됩니다.제어판의 프로세서는 로봇의 평생 동안 이 계산 부하를 중단 없이 처리합니다, 전형적인 용접 및 처리 응용 프로그램에서 10~20 년 동안 세 차례 생산을 실행 할 수 있습니다.
FSSB 왜 광섬유로봇서보 통신
제어기와 세르보 증폭기 제어판 사이의 통신을 위해 구리 와이어 대신 광섬유 FSSB를 선택하는 것은 의도적이고 중요합니다.
FANUC 로봇 캐비닛에는 상당한 전자기 간섭원이 있습니다.재생 회로의 방출 펄스, 그리고 기계 I/O를 위한 24VDC 릴레이 스위치.
이 소스 근처에 달리는 모든 구리 신호 케이블은, 세르보 루프가 요구하는 마이크로초 타이밍 해상도에서 데이터를 손상시킬 수 있는 간섭을 감지합니다.
Fibre-optic cables are inherently immune to electromagnetic interference — light does not experience the same inductive coupling and capacitive crosstalk that afflicts copper conductors in high-noise environments.
FSSB 광섬유 케이블은 컨트롤러 본보드와 A16B-3200-0610 사이의 결정적,오류 없는 디지털 데이터, 단지 센티미터 거리에 있는 세르보 증폭기의 전력 부문에서 무슨 일이 일어나고 있든 상관없이.
이 때문에 손상된 섬유 케이블로 인한 FSSB 연결 오류는 간헐적으로 설명되지 않은 서보 오류가 아닌 즉각적이고 일관성있는 FSSB 경보 코드를 생성합니다.
A16B-3200-0610 결함 대 전원 보드 결함 진단
A06B-6107는 A16B-3200-0610 제어판과 전원 회로판을 모두 포함합니다. 로봇 축 경보가 발생하면제어판 오류와 전원 보드 오류를 구별하려면 각 보드의 오류 서명 이해가 필요합니다.:
제어판 고장일반적으로 여러 축에 동시에 영향을 미치기 (한 보드가 여섯 개의 모든 축을 제어하기 때문에) 또는 FSSB 통신 전체에 영향을 미치기,작동 중 단축적 경보보다는 시작 시 모든 축의 서보 경보로 표시되는.
A16B-3200-0610의 얼굴에 있는 LED 배열은 시스템 경보 코드를 보냅니다.
전력판 고장일반적으로 단일 축 또는 쌍 축 알람으로 나타납니다 (전력 섹션은 때때로 쌍으로 구성되어 있기 때문에), 종종 과류를 나타내는 알람 코드, IPM 알람과 함께,또는 특정 축의 DC 버스 결함.
판별 LED 또는 영향을 받은 축의 표시기는 경보를 표시합니다.
여러 개의 모든 축 알람의 존재는 시작과 함께 FSSB 연결이 확립되지 않는 것으로 A16B-3200-0610에 강력하게 지적됩니다.
특정 움직임 (특히 가중된 관절의 빠른 가속을 포함하는 것) 도중 단축 IPM 경보가 전력 섹션을 가리킨다.
FAQ
Q1: A16B-3200-0610 제어판은 전력판을 교체하지 않고 교체 할 수 있습니까?
A16B-3200-0610은 A06B-6107 증폭기의 전력 회로 보드와 물리적으로 구별되는 보드입니다.제어판이 고장 났을 때, 전력 보드는 일반적으로 검사되지만 자동으로 교체되지 않습니다.
반대로, 전원 보드가 고장 났을 때 (예를 들어 IPM 모듈 고장),A16B-3200-0610 제어판은 일반적으로 전력 장애가 전압 이벤트로 제어판을 손상시키지 않는 한 유지됩니다..
A06B-6107의 제어판에 접근하는 것은 R-30iA 유지보수 설명서에서 설명된 제조업체의 해체 절차를 따릅니다.
Q2: A16B-3200-0610을 교체 한 후 로봇 프로그램과 캘리브레이션 데이터가 다시 충전되어야합니까?
A16B-3200-0610 제어판은 로봇 프로그램, 마스터링 데이터,또는 구성 데이터 these 이들은 로봇 컨트롤러의 메인 보드 (특히 SRAM 및 FROM 모듈) 에 보관됩니다..
서보 증폭기 제어판을 교체하면 제어기에 저장된 데이터에 영향을 미치지 않습니다.
그러나 증폭기를 교체한 후 로봇을 켜면 로봇의 마스터링 (각 관절에 대한 절대적 인코더 참조 위치) 이 확인되어야 합니다.증폭기 서비스 중 절대적 인 코더 배터리 연결의 장애는 마스터 데이터에 영향을 줄 수 있습니다..
생산에 다시 들어가기 전에 테스트 프로그램으로 로봇의 정확성을 확인합니다.
Q3: A06B-6107는 여러 축에서 동시에 "SRVO-047 세르보 모터 속도 오류"라는 경보를 생성합니다. 이것은 A16B-3200-0610이 실패한 것을 확인합니까?
SRVO-047 on multiple axes simultaneously is consistent with an FSSB communication failure — the controller's main board cannot synchronise velocity command data exchange with the servo amplifier control board.
이 알람은 FSSB 연결 (섬유 광 케이블, 커넥터), A16B-3200-0610의 FSSB 수신 회로 또는 컨트롤러 본 보드의 FSSB 송신 회로로 향합니다.
A16B-3200-0610을 교체하기 전에 FSSB 광섬유 케이블의 연결 장치를 검사하고 청소하고 케이블이 지정된 최소 구부름 반사보다 작은 반사에서 구부러지지 않았는지 확인합니다.
손상된 섬유 케이블은 고장난 보드보다 더 흔하며 교체 비용이 훨씬 저렴합니다.
Q4: 생산 용접 로봇에서 A16B-3200-0610의 예상 사용 기간은 무엇입니까?
단 하나의 답은 없습니다. 사용 기간은 운영 환경에 크게 달려 있습니다. (환경 온도, 오염 수준, 진동 노출)캐비닛 냉각의 품질 (불충분한 냉각은 전자 부품 노화의 단일 가장 일반적인 가속 요소입니다), 그리고 전압 사건 (전력 급증, 증폭 버스 방출 사건) 이 발생했는지 여부를 확인합니다.A16B-3200-0610 보드는 15~20년 동안 고장없이 정상적으로 작동합니다..
가열되고 오염된 환경과 변동 전력 품질에서 7~10 년의 장애는 드문 일이 아닙니다.
캐비닛 청소, 냉각 팬 검사 및 10 년 표시에서 콘덴시터 교체 등 예방 유지 보수가 부품 수명을 크게 연장합니다.
Q5: 특정 A06B-6107 변종과 호환성을 보장하기 위해 A16B-3200-0610의 출처가 올바르게 어떻게 되나요?
A06B-6107 세르보 증폭기는 여러 H 시리즈 변종 (H001, H002, H007 및 기타) 로 제공됩니다. 각각은 다른 모터 크기와 등급을 가진 다른 로봇 모델에 맞게 구성됩니다.
A16B-3200-0610 제어판은 이러한 변종에 공통된 제어판이며, 변종 간의 차이는 서로 다른 전력 회로판 사양에 의해 수행됩니다.
A16B-3200-0610 부품 번호는 올바른 제어판을 주문하기에 충분합니다. 제어판 자체에 대한 추가 H 시리즈 변수 사양이 필요하지 않습니다.
주문하기 전에 설치된 판에 표시된 라벨에 부품 번호를 확인하세요.

 귀하의 메시지는 20-3,000 자 사이 여야합니다!
귀하의 메시지는 20-3,000 자 사이 여야합니다!